2. 随机变量的数学统计特征
2.1. 单变量的数学特征
2.1.1. 期望--中心度
对于连续型随机变量$X$,有概率密度函数$f(x)$,则定义
$$E(X)= \int_{ - \infty }^{ + \infty } {f(x)dx} $$
为$X$的数学期望。
对于离散型的随机变量$X$,$X$的数学期望就是随机变量$X$的取值与发生概率相乘得到的加和。
$$E(X)= \sum {f(x_i)} $$
2.1.2. 方差--分散度
设$X$是一个随机变量,若 $E{[X-E(X)]^2}$存在,则称$E{[X-E(X)]}$为$X$的方差,记为$D(X)$或$Var(X)$,即
$$D(X) = Var(x) = E{[X-E(X)]^2}$$
$\sqrt{D(X)}$称为$X$的标准差;
若$X$是离散型随机变量,则
$$D(X)= \sum_{k=1}^{\infty}[x_{k}-E(X)]^{2}p_{k}$$
若$X$是连续型随机变量,则
$$D(X)= \int_{-\infty}^{\infty}[x-E(X)]^{2}f(x)dx$$
补充:
方差的推导关系:
$\color{blue}{D(X) }$
$= E{[X-E(X) ]^2 }$
$= E{X^2-2XE(X)+[E(X) ]^2 }$
$=E(X^2 )-2E(X)E(X)+[E(X) ]^2$
$\color{blue}{=E(X^2 )-[E(X)]^2}$
2.2. 多变量的数学特征
2.2.1. 协方差--关联方向协同性
称$E{(X-E(X))(y-E(Y))}$为随机变量$X$与$Y$的协方差,记为$Cov(X,Y)$
$${Cov(X,Y)}
=E{(X-E(X) )(y-E(Y))}
{=E(XY)-E(X)E(Y)}$$
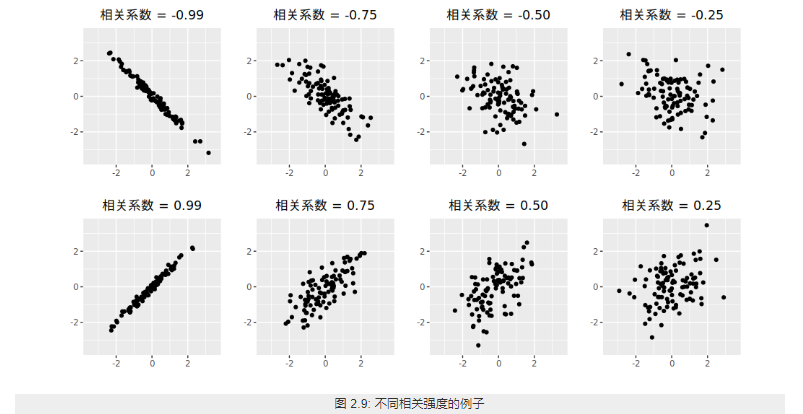
2.2.2. 相关系数--关联紧密性
相关性(correlation)是两个随机变量和之间线性关系的强度和方向。
2.2.2.1. 皮尔逊相关系数
Pearson product-moment correlation coefficient
称
$$ρ_{X,Y}=\frac{Cov(X,Y)}{\sqrt{D(X)D(Y)}}$$
为随机变量$X$与$Y$的相关系数。描述X 与Y的关联度。相关系数就是消除了量纲的影响。
2.3. 单变量序列的数学特征
类比于随机变量的数学特征,下面是随机变量序列的一些数学特征:
随机变量序列${y_{t}:t=0,1,2,... }$称为一个时间序列模型。
2.3.1. 均值函数--中心度
$$u_{t}=E(y_{t} ),t=0,1,2,…$$
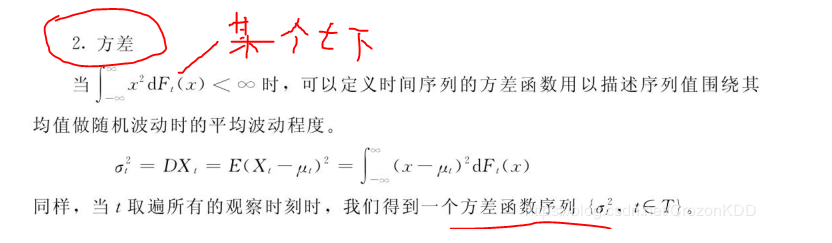
2.3.2. 方差
2.3.3. 自相关性
序列相关(serial correlation),也叫自相关(autocorrelation),是指一个时间序列{x1,x2,x3...,xn}这些值前后自己相关,又称为滞后相关性。
2.3.3.1. 依据自相关性的序列分类
digraph { 序列数据->自相关序列 序列数据->序列不相关序列(白噪音) }
2.3.3.1.1. 白噪音
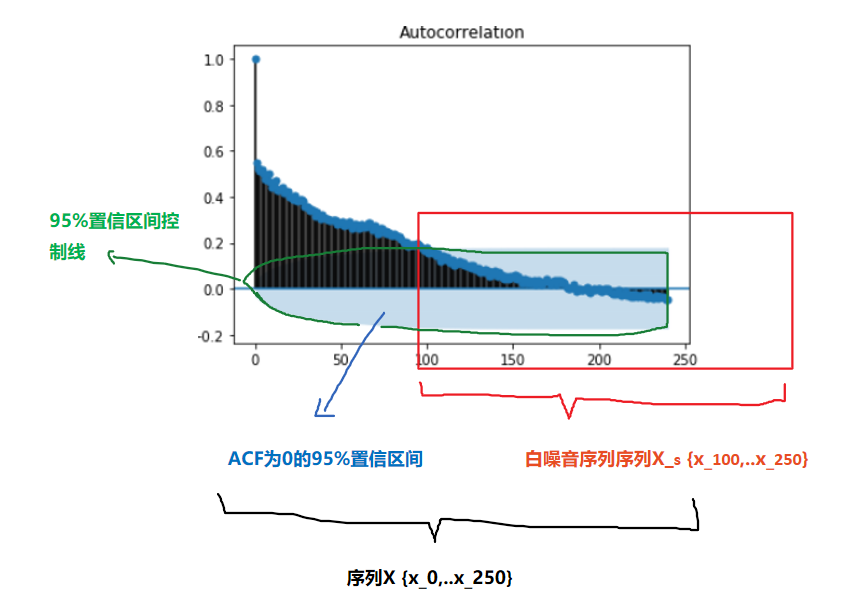
白噪声序列的自相关函数为0(ρ0 =1除外)。
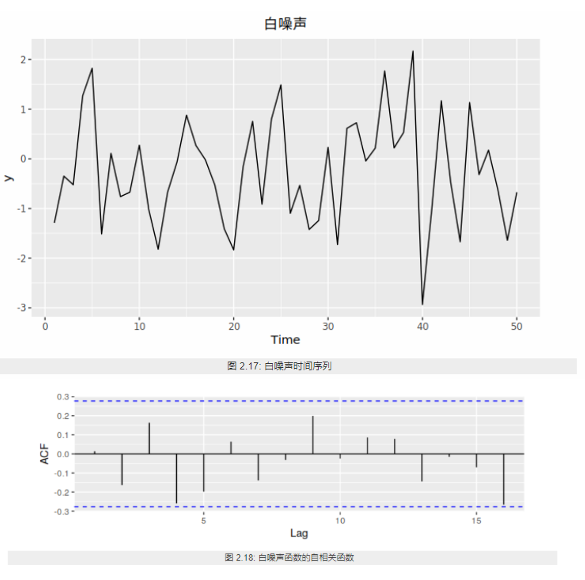
实际应用中如果样本自相关函数近似为零(ACF 图中都位于控制线之内或基本不超出控制线),则可认为该序列是白噪声的样本。
设 {Xt} 是独立同分布的二阶矩有限的随机变量,称 {Xt} 为独立同分布白噪声 (white noise),又称为纯随机序列。最常用的白噪声一般假设均值为零。如果 {Xt} 独立同 N(0,σ2) 分布,称 {Xt} 为高斯 (Gaussian) 白噪声或正态白噪声。
2.3.3.1.2. 自相关序列
判定序列的自相关性指标有:
1. 自协方
2. ACF
3. PACF
4. LB 检验
ACF还是PACF都仅仅考虑是否存在某一特定滞后阶数的相关。LB检验则是基于一系列滞后阶数,
2.3.3.2. 自协方差函数 AutoCovariance
$$\color{red}{\gamma{(t,s)}}
=Cov(y_t ,y_s )
=E[(y_t-u_t )(y_s-u_s ) ]
\color{red}{=E(y_t y_s )-u_{t} u_{s}},
t,s=0,1,2,…$$
某个信号与其自身经过一定时间平移之后的相似性
2.3.3.3. 自相关函数 ACF
$$ρ_{k}=\frac{Cov(y_{t},y_{t-k})}{\sqrt{Var(y_{t-k})Var(y_t)}}$$
$k$ 滞后因子(置滞后项),就是做差分的 时差
$ρ_{k}$ 当滞后因子为k时的自相关系数
$y_{t-k}$ 做差分后的序列
应为对于特定序列Y而言,自相关系数 是一个与 滞后因子k 相关的函数。将其称为自相关函数 ACF
import statsmodels.tsa.api as smt """ tsa是Time Series analysis缩写 tsa的stattools(统计工具)提供了计算acf和pacf以及后面要用到的adfuller单位根检验函数 使用help(smt.stattools.acf)可以查看相关参数设置 """ # 计算自相关系数,这里设置滞后项为5期,默认是40期滞后 acf=smt.stattools.acf(df,nlags=5) # 计算偏自相关系数 pacf=smt.stattools.pacf(df,nlags=5) print(f'自相关系数为:{acf};\n偏自相关系数为:{pacf}') >>> 自相关系数为:[1. 0.99098764 0.98189466 0.97312885 0.96252012 0.95335064] 偏自相关系数为:[ 1. 0.99231072 -0.01047826 0.01620047 -0.12635305 0.09200772] from statsmodels.graphics import tsaplots tsapltots.plot_acf(Train_Y,use_vlines=True,lags=80) print("60 以后tsapltots判定为acf==0 (alpha=0.05,95%置信度)") plt.show()
2.3.3.4. 偏自相关函数 PACF
PACF
import statsmodels.tsa.api as smt pacf=smt.stattools.pacf(df,nlags=5) # pacf .shape ==df.shape from statsmodels.graphics import tsaplots tsaplots.plot_pacf( x, ax=None, lags=None, alpha=0.05, method='ywunbiased', use_vlines=True, title='Partial Autocorrelation', zero=True, vlines_kwargs=None, **kwargs, ) print("60 以后tsapltots判定为acf==0 (alpha=0.05,95%置信度)") plt.show()
滞后相关的一种统计检验
2.3.3.5. Ljung-box 检验(白噪音检测)
对于序列
$$X_n={ x_1,x_2,...x_n }$$
为了检验时间序列样本是否来自白噪声序列,可以检验 ρk =0,k =1,2,... 的零假设。
Box 和 Pierce(Box and Pierce, 1970) 提出了混成统计量 (Portmanteau statistic)用来检验零假设H0。
$$H0 : ρ1 =···= ρm =0$$
$$Ha : 不全为零$$
在{Xt}是独立白噪声序列条件下,Q∗(m) 近似服从 χ2(m) 分布。给定检验水平 α,当 Q∗(m) > qchisq(1− α,m) 时拒绝 H0,否定白噪声假设。
Ljung 和 Box(Ljung and Box, 1978) 对此检验方法进行了改进。统计量改为
$$Q(m)= T(T +2) \sum_{j=1}^m=\frac{ρ2}{T −j} $$
在独立同分布白噪声假设下仍近似服从 χ2(m) 分布。当 Q(m) > qchisq(1−α,m) 时拒绝 H0,否定白噪 声假设。这个检验称为 Ljung-Box 白噪声检验。
import statsmodels q_statarray,p_value =statsmodels.tsa.stattools.q_stat(x, nobs, type='ljungbox') q_statarray # shape =x.shape >>> p_value # shape =x.shape >>> # p_valeue 一般查看最后一个值 # 当 p_valeue > 5%(0.05) ,则接收假设,认为序列是白噪音 # 当 p_valeue <5% , 则拒绝假设,认为序列是非白噪音
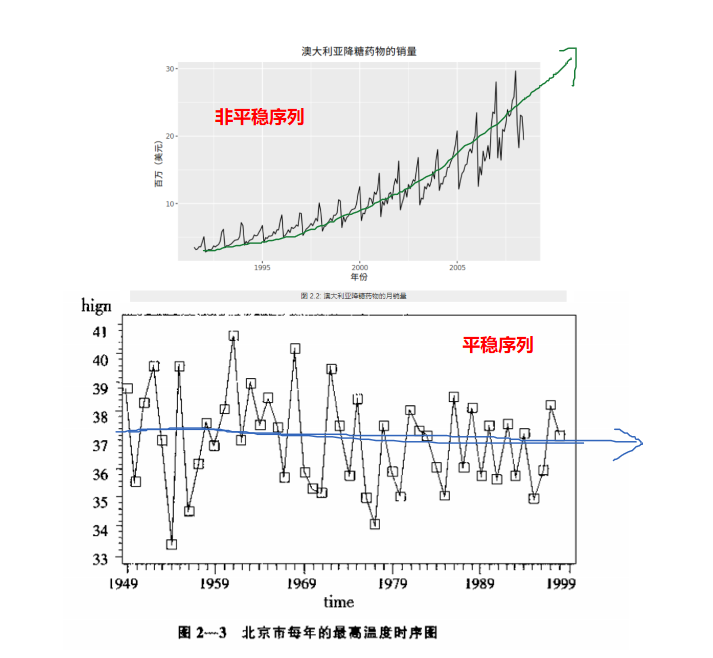
2.3.4. 平稳性
平稳性就是时间序列的统计性质关于时间平移的不变性,要求序列的均值和方差不发生明显变化。
2.3.4.1. 平稳性分类
digraph { 序列数据->非平稳序列 序列数据->平稳序列 平稳序列->强平稳序列(理论上) 平稳序列->弱平稳序列[color=red,label="一般指的是"] }
严平稳
严平稳表示所用统计性质不随时间的改变而改变。
$$F(x_1,x_2..x_n)=F(x_{1+t},x_{2+t}...,x_{n+t})$$
F为{x1,x2,...xn}的联合分布。过于严苛,一般实际中都是弱平稳序列。一般提及稳定序列指的是弱平稳序列。
弱平稳
弱平稳:期望与相关系数(依赖性)不变未来某时刻的$t$的值$Y_{t}$就要依赖于它的过去信息,所以需要依赖性
-
均值$E(Y_{t})= μ$与时间$t$无关的常数;
-
方差$Var(Y_{t} )= \gamma$与时间$t$无关的常数;
-
协方差$Cov(Y_{t},Y_{t+k} )= \gamma_{0,k}$只与时间间隔$k$有关,与时间$t$无关的常数。
-
自相关系数$ρ_{k }=\frac{Cov(y_{t }, y_{t-k})}{\sqrt{Var(y_{t-k)}Var{(y_t)}}}=\frac{Cov(y_{t }, y_{t-k})}{Var{(y_t)}}= \frac{\gamma_{k}}{\gamma_{0}} $
2.3.4.2. 定性判断平稳性
2.3.4.2.1. 时序图
平稳序列:在一定范围内上下波动
非平稳序列:有上升、下降趋势
2.3.4.2.2. 自相关图/偏相关图
平稳序列: 自相关系数快速(或某一阶段后)降低为0(或附近)
非平稳序列: 自相关系数缓慢降低
2.3.4.3. 定量判定平稳性
2.3.4.3.1. ADF检验
ADF检验全称是 Augmented Dickey-Fuller test,也叫做单位根(unit root)检验。顾名思义,ADF是 Dickey-Fuller检验的增广形式。DF检验只能应用于一阶情况,当序列存在高阶的滞后相关时,可以使用ADF检验,所以说ADF是对DF检验的扩展。
单位根就是指单位根过程,可以证明,序列中存在单位根过程就不平稳,会使回归分析中存在伪回归
主要思想:
digraph a{ 假设存在单位根->平稳序列[label="不存在 p_value<0.05",color=blue] 假设存在单位根->非平稳序列[label="存在 p_value>0.05",color=red] }
from arch.unitroot import ADF ADF_instance=ADF(x,lags=10) print (ADF_instance) >>> Augmented Dickey-Fuller Results ===================================== Test Statistic -8.635 P-value 0.000 Lags 10 ------------------------------------- Trend: Constant Critical Values: -3.43 (1%), -2.86 (5%), -2.57 (10%) Null Hypothesis: The process contains a unit root. Alternative Hypothesis: The process is weakly stationary. # 若按照5% 致信区间判定 if ADF_instance.stat<ADF_instance.critical_values["5%"]: print("拒绝假设,不存在单元根,序列是宽平稳的,是平稳序列") if ADF_instance.p_value<0.05: print("拒绝假设,不存在单元根,序列是宽平稳的,是平稳序列")
2.3.5. 概念漂移
概念漂移(Concept drift)就是目标变量随着时间的推移发生改变。概念指的就是一个模型要去预测的一个目标变量
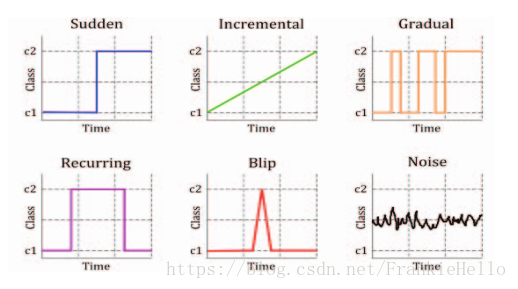
2.3.5.1. 分类
-
sudden 指的是迅速同时又不可逆的改变,强调的是发生的迅速。
-
incremental和gradual都是强调改变发生的缓慢,incremental强调值的随时间改变,gradual则是数据分布的改变。也有些研究者将这两种变化划分为同一类,用incremental gradual这个术语来代替。
-
recurring则是一种temporary(临时性)的改变,在一段短时间内会恢复之前的状态。所以也有些研究者将其称为local drift,它不具有周期性,是在不规则的时间间隔内反复转换。
-
blip是代表一种很稀少的事件,它可以被视为一种anomaly或者outlier(异常)。
-
noise是一种随机的改变,通常这种数据会从样本数据中filter out。
2.3.5.2. 检测
DDM(Drift Detection Method)
EDDM(Early Drift Detection Method)
DDD(Diversity for Dealing with Drifts)
Ensemble with different diversity
Hoeffding trees
Ensemble Learnings
2.4. 多变量序列的数学特征
2.4.1. 多变量之间的相关性/独立性
相关关系(correlation)
stattools.ccovf(x, y[, adjusted, demean]) Calculate the crosscovariance between two series. stattools.ccf(x, y[, adjusted]) The cross-correlation function.
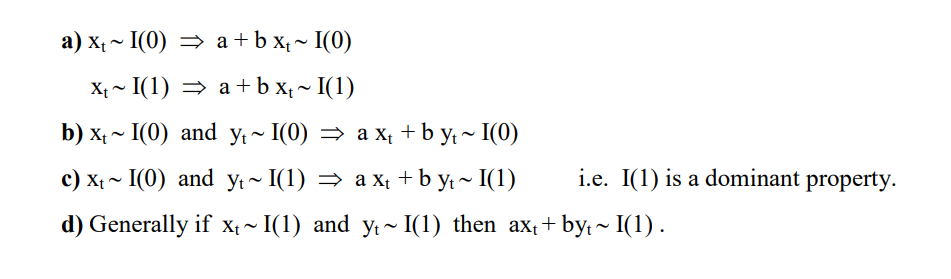
2.4.2. 多变量之间的协整关系
如果两组序列是非平稳的,但它们的线性组合可以得到一个平稳序列,那么我们就说这两组时间序列数据具有协整(cointegration)的性质。
2.4.2.1. 多个序列变量组合的规则
2.4.2.2. Engle-Granger两步协整检验
若$Y_t$,$X_t$ 属于I(1)
步骤
1. 通过最小二乘回归得到协整系数$\beta$和残差序列$R_t$
$Y_t=\beta X_t+R_t$
2. 对残差序列$R_t$ 进行自稳定性检验(ADF),如果$R_t$ 平稳则协整
缺点
不能同时处理多个协整关系
原假设H0是不存在协整关系,替代假设是存在协整关系。如果p值很小,低于临界大小,那么我们可以拒绝没有协整关系的假设,认为存在协整关系。
#cointegration 协整性 coint_t,p_value,crit_value=statsmodels.tsa.stattools.coint(y0,y1,trend ='c',method ='aeg',maxlag = None,autolag ='aic',return_results = None) if p_value<0.01: print("y0 y1 存在协整关系") y0:
应用
两组时间序列数据的差是平稳的
当两只股票的价差过大,根据平稳性我们预期价差会收敛,因此买入低价的股票,卖空高价的股票,等待价格回归的时候进行反向操作从而获利。
这就是配对交易(pairs trading)的由来。
(Phillips and Ouliaris 1990)给出了利用回归残差进行协整检验的方法, 包含两种方法, 方差比方法和多元迹统计量方法。 R扩展包urca的ca.po()可以用来计算Phillips-Ouliaris检验。 选项demean="constant"指定有确定性常数趋势, demean="trend"指定有确定性线性趋势, 缺省为demean="none",没有确定性趋势(无漂移)。 选项type="Pu"指定使用方差比方法, 选项type="Pz"指定使用多元迹方法, 多元迹方法对哪个分量作为回归因变量不敏感。
2.4.2.3. JJ检验
而Johansen协整检验法采用的是多元方程技术
statsmodels.tsa.vector_ar.vecm.coint_johansen(endog, det_order, k_ar_diff) def coint_johansen(endog, det_order, k_ar_diff): """ Johansen 检验 参数 ---------- endog : array_like (nobs_tot x neqs) Data to test det_order : int * -1 - no deterministic terms * 0 - constant term * 1 - linear trend k_ar_diff : int, nonnegative Number of lagged differences in the model. Returns ------- result : JohansenTestResult An object containing the test's results. The most important attributes of the result class are: * trace_stat and trace_stat_crit_vals * max_eig_stat and max_eig_stat_crit_vals """ import warnings if det_order not in [-1, 0, 1]: warnings.warn("Critical values are only available for a det_order of " "-1, 0, or 1.", category=HypothesisTestWarning) if endog.shape[1] > 12: # todo: test with a time series of 13 variables warnings.warn("Critical values are only available for time series " "with 12 variables at most.", category=HypothesisTestWarning) from statsmodels.regression.linear_model import OLS def detrend(y, order): if order == -1: return y return OLS(y, np.vander(np.linspace(-1, 1, len(y)), order+1)).fit().resid def resid(y, x): if x.size == 0: return y r = y - np.dot(x, np.dot(np.linalg.pinv(x), y)) return r endog = np.asarray(endog) nobs, neqs = endog.shape # why this? f is detrend transformed series, det_order is detrend data if det_order > -1: f = 0 else: f = det_order endog = detrend(endog, det_order) dx = np.diff(endog, 1, axis=0) z = lagmat(dx, k_ar_diff) z = z[k_ar_diff:] z = detrend(z, f) dx = dx[k_ar_diff:] dx = detrend(dx, f) r0t = resid(dx, z) # GH 5731, [:-0] does not work, need [:t-0] lx = endog[:(endog.shape[0]-k_ar_diff)] lx = lx[1:] dx = detrend(lx, f) rkt = resid(dx, z) # level on lagged diffs # Level covariance after filtering k_ar_diff skk = np.dot(rkt.T, rkt) / rkt.shape[0] # Covariacne between filtered and unfiltered sk0 = np.dot(rkt.T, r0t) / rkt.shape[0] s00 = np.dot(r0t.T, r0t) / r0t.shape[0] sig = np.dot(sk0, np.dot(inv(s00), sk0.T)) tmp = inv(skk) au, du = np.linalg.eig(np.dot(tmp, sig)) # au is eval, du is evec temp = inv(np.linalg.cholesky(np.dot(du.T, np.dot(skk, du)))) dt = np.dot(du, temp) # JP: the next part can be done much easier auind = np.argsort(au) aind = np.flipud(auind) a = au[aind] d = dt[:, aind] # Normalize by first non-zero element of d, usually [0, 0] # GH 5517 non_zero_d = d.flat != 0 if np.any(non_zero_d): d *= np.sign(d.flat[non_zero_d][0]) # Compute the trace and max eigenvalue statistics lr1 = np.zeros(neqs) lr2 = np.zeros(neqs) cvm = np.zeros((neqs, 3)) cvt = np.zeros((neqs, 3)) iota = np.ones(neqs) t, junk = rkt.shape for i in range(0, neqs): tmp = np.log(iota - a)[i:] lr1[i] = -t * np.sum(tmp, 0) lr2[i] = -t * np.log(1-a[i]) cvm[i, :] = c_sja(neqs - i, det_order) cvt[i, :] = c_sjt(neqs - i, det_order) aind[i] = i return JohansenTestResult(rkt, r0t, a, d, lr1, lr2, cvt, cvm, aind)
